虽然现阶段软体机器人领域的研究和相关技术不成熟,但其应用前景广泛,是未来的一个重要发展方向,未来必将会出现新的变革!
众所周知,象鼻、哺乳动物的舌头和章鱼的前肢等,都是由生物肌肉构成的,具有产生复杂的变形的能力,如象鼻的螺旋/斜肌纤维能够促使象鼻扭转。其各种行为动作是由内部复杂的的肌肉组织网控制的。
以此为启发,近来,迪士尼研究院(DisneyResearch)的科学家们研究了软体机器人的纤维肌肉嵌入式驱动系统,特别是单个肌肉纤维的循迹与驱动问题。并向我们展示了一个长方体棒扭转试验、一个水下连续体机器人、一个水下触手机器人实现路径循迹和一个小海龟机器人四足行走演示。
文章介绍了一种数据驱动的McKibben肌肉模型,(二十世纪五十年代,美国医生Joseph.L.Mckibben发明了一种以其名字命名的气动肌肉,即Mickibben肌肉,旨在辅助残疾手指的运动),模拟其嵌入硅脂弹性体基质中时的收缩动作,由于软连续体和执行器之间的非线性耦合,控制和路径参数之间的复杂相互作用,以及变形影响,作者提出了一种可微分超弹性材料模拟算法,使用移动最小二乘公式,使变形梯度两次可微,由此进行了仿真设计优化,进而实现软体机器人中纤维肌肉驱动的自动路径循迹,以获得机器人的期望形变动作。
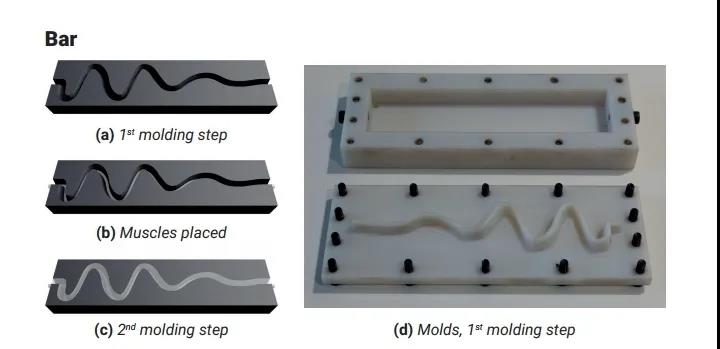
实验使用轻薄McKibben肌肉纤维驱动器,穿过柔软可控的硅胶体(基于Neo-Hookean材料模型),这些硅胶本体是用3D打印的模具制造出的。(作者的方法和模型同样适用于其他嵌入式纤维类驱动机构,例如形状记忆合金等)。
对于流体驱动人工肌肉来说,常用材料的杨氏模量在104 ~109 Pa的范围,与生物肌肉组织一致。与自然生物肌肉相似,这些软材料在面对载荷和冲击时会趋于产生弹性变形,因而表现出良好的顺应性。需要注意的是,许多材料是粘弹性的,所以滞后损失是选择材料的另一个重要因素,粘弹性材料在加载和卸载过程中会导致能量损失,而纯弹性材料不耗散能量。作为粘性较小的弹性材料,硅橡胶是高循环加载或要求高弹性回弹的流体驱动人工肌肉最常用的材料,在气动或液压驱动下,硅橡胶还可以表现出巨大的持续变形,而不会泄漏气体或液体。
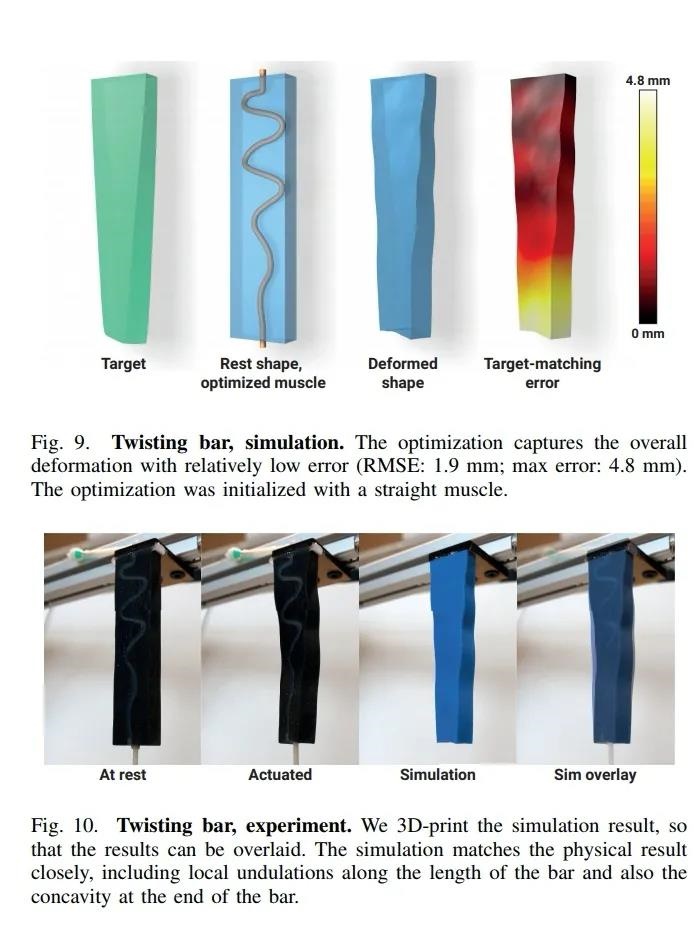
气动人工肌肉的运动形式在一定程度上仅局限于单轴收缩和拉伸,这也限制了其发展。虽然大多数软体机器人设计中已经能实现弯曲,但作者在一个长方体棒块的例子中,研究了其技术在近似扭转变形中的使用。扭转块长129mm,实验时在中心线位置放置一条跟踪曲线,模拟优化后,硅胶条远端扭角为39.3……为了直观显现实际实验与仿真的对比结果,实验者3D打印出仿真模型,并安装在实验位置,通过图像覆盖拟合,向我们展示对比结果,显示实验与仿真模型吻合度很好。
连续体机器人是安装在水下的圆柱形硅胶体,直径16mm,长度300mm。这种机器人可以用来检查水下结构,为了忽略重力与浮力影响,执行器中的工作流体也是水,同样的,实验中放置一条沿机器人全长的跟踪曲线,目标的形变形状绕多个轴弯曲并且曲率连续。从3D打印的仿真模型覆盖到实验结果图来看吻合度较好,利用图像分析工具,目标误差约为9mm。
触手机器人的形状是一个直触须,长298mm,同样安装在水下,并用水作为执行器的工作流体,对于全长度情况,实验者放置全长跟踪曲线,用以优化整条触手的位置和方向,而实际上这种机器人更重要的是控制末端,执行任务,故实验时还设置了只跟踪触手尖端的位置和方向的情况。通过之前的方法,进行图像叠加,发现全长度情况下最大误差为20.5mm,仅尖端情况下最大误差40.1mm,主要原因是触手在驱动器影响下不可避免的产生长度收缩的现象,考虑到这一点,实验结果还是吻合度较好的。
四足行走机器人体长42mm,与其他分别控制四足弯曲的方法不同,实验者设定了弯折和扭转两个目标,扭转使两腿接触地面,弯折使机器人向前迈步,故步态循环包括了:复原,弯折,弯折+扭转,扭转。为了建模仿真优化,实验者只考虑小海龟身体的运动,尾部和后腿起到稳定的作用,头部负责实现前腿的步态,绿色的肌肉纤维可以实现弯折动作,而橙色纤维则是控制扭转动作。实验中小海龟向前速度是7.9体长/分钟。
总结与展望
作者基于根据理论分析的模型来设计建模仿真,基于Neo-Hookean(HK)材料模型、有限元方法、分段恒曲率模型等方法,建立了纤维肌肉驱动软体机器人的模型,并优化软体机器人实现自动路径循迹。
但是软体机器人的本体多采用超弹性材料制备(如硅胶),因其受非线性影响,其进行有限元分析需要进行大量运算,结构复杂的软体机器人仿真分析容易失败。称
虽然此类方法建模复杂且精度有限,并且复杂的多自由度变形模型分析和处理难度更大,但是这些方法对基于建模仿真的软体机器人进行了实践和探索,正如作者所展望的,计算机辅助设计方法带来的新兴技术,将会更好的推动软体机器人的制造发展,如3D打印刚性模具再浇铸,包括熔融沉积(FDM)、直接墨水书写(DIW)、选择性激光烧结(SLS)、立体印刷(SLA)等。
除此之外,嵌入式纤维执行器可以方便的改变数量以及在本体中的排布位置,特别是针对更大更复杂的系统,未来的工作将会是不断优化执行器的自动实现路径循迹,并提高控制精度。